偶尔,翻阅前几年看到的文章,实际上可见,现在有人热烈炒作的那些东西,不过是炒冷饭而已,而已而已,并不是什么新东西。这是一篇2013年在《Inside GNSS》上发表的文章。
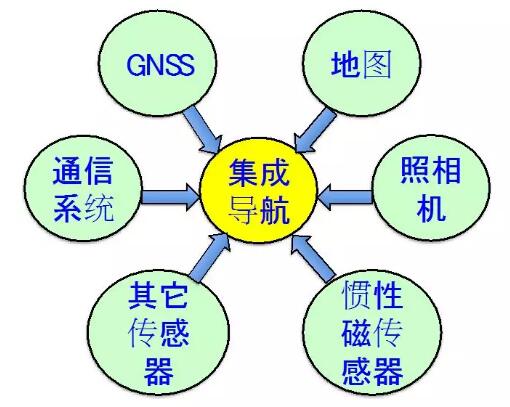
照相机是个多才多艺的传感器,它既可以作为定位手段,也可以进行航向推算。新的GNSS信号和系统,不仅改进了精度,而且与其它技术的组合提高了抗干扰能力和改进了鲁棒性。城市和建筑物的3D图形,有助于解决闹市区域的导航难题,实现肩并肩的协同定位。可用传感器爆发性增长,能够组合成可靠的行人导向装置。现代导航已经进入那么多工具集成工作在一起的时代。
为了应对我们时代最伟大的定位挑战,当前许多新的概念形成热潮。为了实现真正的需求应用,如可靠的行人导航、车道级识别方法,和对抗骚扰、干扰和欺骗的鲁棒性技术,我们需要将这些不同的概念组合集成到一起。这里把十种与GNSS密切相关的,人们熟悉的,或者新概念的发展趋势作个介绍。其中包括:导航用照相机、小型便宜的传感器、多模GNSS信号与系统、定位用通信信号、3D图形、多传感器导航、场景化定位、机会信号、协同定位和完好性技术。
无处不在的照相机。近些年来,照相机逐步成为重要的新的导航传感器,虽然视觉导航系统从上世纪九十年代已经开始发展,但是硬件的价格和图像解释要求的处理能力无法满足,限制了它的应用。现在便宜的数字照相机已经十分普及。照相机业已成为移动电话、自主车辆的标准设备,从硬件而言,照相机与导航系统已形成协议连接。过去十年间,移动平台的图像处理和计算能力有了长足进步,基于照相机的研究已经深入导航和定位界。照相机是多才多艺的传感器,在导航中至少有三种不同的方式加以运用。一是作为系列存储图像以确定照相机视点;二是识别图像独特的特征,细化完善定位数据;三是作为视觉里程计,形成航向推算能力。
微型传感器、雷达和其它。数十年来的研究,已经形成加速度计、陀螺仪和时钟,重点是解决小型、轻便、低价位、低功耗问题,业已取得明显进步。通过改进滤波和定标技术,部署传感器阵列,可以大为改进现有的传感器性能。美国国防先进研究计划局(DARPA)研究了微型传感器技术,以降低GPS干扰带来的军用脆弱性。潜艇导航测试了冷原子钟干涉仪,以及片上原子钟现在已经投入商业应用。磁力计改进不大,但是已经大量用于低价位场合,它们的精度性能对于姿态确定的影响不是关键,更大的影响来自于环境磁异常,和车辆载体的磁化效应。数十年来,雷达用于空中和海上导航,提供航位推算和定位。雷达系统用于自主陆地车辆的防碰撞,而且已经成为普通汽车的标准导航配置。3D莱塞提供的分辨率高于雷达,但是作用距离较短。扫描莱塞器提供最高的分辨率,快闪LiDAR快速更新率和低价位、小型化与低功耗。
GNSS及其成功的烦恼。新的GNSS星座、信号和相关的频率分集,激励了用户设备设计创新,导致定标电离层传播时延能力的改进和抗干扰的鲁棒性增加,以及高码率信号形成的更好的精度。多模GNSS信号支持自主完好性监测和非视距传播的检测。检测技术包括多频信噪比比较、卫星内部一致性验证和双极化天线使用。即使四个卫星星座的使用,也有地方无法同时收到四颗卫星的视距信号,如城市峡谷,或者室内情况。显然,GNSS的成功,也存在其烦恼。因此,开展干扰源检测和消除其影响,开展频谱保护行动。在GNSS现代化过程中,不断改进干扰缓解技术,更多地采用组合信号、矢量跟踪和捕获技术,利用更多的卫星和信号。拓展相关积分时间间隔长度,改进接收机灵敏度,更加容易地接收无数据信号。当然,最大的阻力来自于骚扰和干扰,所以提倡GNSS与其它导航技术的集成融合。
通信与定位算法。过去十年来,导航技术的最大创新是将通信信号用于定位目的。智能电话和其它消费设备现在用电话信号和WiFi定位。超宽带(UWB)通信信号,也专门用于定位应用。新的通信标准也伴有定位技术,下一波基于通信的定位系统,可能是在第五代移动通信、蓝牙低功耗,以及铱星这样的通信卫星。新的通信系统伴有通用的协调定位协议。在将来的系统中,最弱的连接通常是信号传播环境。因此,测距精度受制于非视距接收和多径干扰。同样,基于信号强度的定位取决于定标方法的范围和信号传播环境随着时间变化的程度。关键是如何表征传播特性,以及在定位算法中将其结合进去。
3D(地)图形。汽车导航应用的数字地图,是在上个世纪90年代开始的,而飞机用的地面参考导航(TRN),使用的是地面高度信息,这要来得更早。如今在具有挑战性的城市区域,3D城市图形可能是最有革命性的定位技术。街图加上高度信息可以辅助GNSS定位,服务于车辆和行人导航,可以减少所要求的卫星信号,或者提供支持基于一致性的非视距(NLOS)和多径效应监测。3D建筑物信息可以帮助预测街区和GNSS与其它无线电信号的反射。这些信息可用来从多个可用的定位计算解决方案中选择最为精确的距离测量方法。原则上,3D建筑物模型可以用来修正NLOS接收和多径效应造成的误差。但是,这对于计算强度要求高,而且多径效应修正需要厘米级精度的建筑物模型,才能够确定信号的相位偏移。伦敦大学学院(UCL)空间大地和导航实验室(SGNL)研发的盲区匹配技术,应用3D模型预测信号被建筑物遮蔽,然后将其与用于定位的实测信号可用性进行比较。盲区匹配可以用来确定城市环境中街区的修正侧,也就是普通的GNSS定位精度不足之处。最近表明这一成果已经用在消费型智能电话的实时工作中。更为详细的图形可以将图形匹配技术从车辆应用扩展至行人导航,直至室内图形修正与匹配。
多传感器导航拼图。历史上,所谓的集成导航,通常是意味着两个系统的组合,如GNSS与惯性导航,偶然也会是三个系统,如GNSS、里程计和(地)图形匹配。但是现在这里所说的将来的集成系统,可能是许多个组成部分构成的。其中主要有两个原因:一是还没有一种技术特别好地工作于行人导航和其它挑战性应用,而高可靠性应用需要有GNSS缓解干扰和骚扰的风险要求;二是通常的智能导航包括有照相机、惯性与磁传感器、地图、GNSS接收机、WiFi收发装置以及移动通信电话本身,所有的组成部分均可用于导航。不久的将来,汽车也会具备适合于导航的不同传感器阵列。将来的导航是多传感器的,会带来两种挑战:一是系统集成,怎样从各种各样的传感器、无线电设备和数据库中提取导航信息,而它们中的大多数安装的目的不是导航,或者关系不大;二是如何实现各种子系统的组合信息的最佳化。许多传感器显示出偏差和其它系统误差,需要在集成系统中加以定标校正。但是子系统也可能输出误差信息,来源是非视距信号传播、误识别信号或者环境特征、或者是主要特性的错误判别。多传感器系统必须检出这种缺省信息,防止它污染其它传感器的定标校正。由此可见,某些子系统的误差特性可能不完全知道,最终不同子系统的性能取决于环境,以及车辆载体和行人用户的动态特性,从而引起了场景问题。
场景就是一切。导航系统工作在一个特定的场景下,在以车辆或者用户为对象的物理环境中,是种确定情况的表现。场景可以给导航解决方案以附加信息。例如,汽车保持在公路上,从定位解决方案而言,可以能够有效地消除一个维度。它们的轮子也强制约束在它们可能运动的路上。减少了要求测量它们运动的惯性传感器数量。同样,行人的航向推算(PDR)使用步进检出,本质上取决于人步行的特征。环境还影响到可用信号类型,例如,GNSS接收机在室内工作得不好,而在郊区无法采用WiFi信号,大部分无线电信号不能够在水下传播。行人与车辆行为特性也取决于环境。与在高速公路相比,汽车在城市中一般行驶的较慢,停顿时间较多。随着频率增加,导航系统应用场景信息(如运动约束条件),可以改进性能。但是,当假设场景与实际场景出入较大时,会出现问题。历史上,导航系统是为一种类型车辆工作在特定环境下设计的。但是导航系统的需求增长,要求工作在各种各样不同的场景下。例如,智能电话可能在室内和室外环境中转换,可能静止不动,可能在行进中,或者也可能在车子上。场景自适应,或者认知定位,代表一种趋势,是种刚刚出现的苗头,导航系统要检测其工作环境,按照检测结果重新设置其算法。各种不同类型的环境的区分,主要基于各种无线电信号的强度和接收到GNSS信号的不同方向。运载体类型可以从它们的速度、加速度分布情况,以及从发动机震动现象导出震动特征、空中湍流、海态运动和公路表面的不规则性。基于导航系统检测到的场景变化,可以通过不同方式处理惯性传感器的数据实现自适应操作,选择不同的地图匹配算法,改变调试集成算法。
机会导航。传统的导航方法是定义一组性能要求,然后部署必要的基础设施和用户设备,以满足这些这些性能要求。机会导航则是,要求采用周围环境中已经有的信息,用来得到最有可能的定位解决方案。本质上,这种原理如同人和动物,原先没有依赖任何的技术帮助,就可进行导航一样。无线电机会信号(SOOP),是将原先非导航目的的信号加以利用,也不需要操作者间的协调,包括来自于网络的电话信号,使用者不一定是用户,附近建筑物中泄漏出来的WiFi信号,以及电视和无线电广播信号。机会信息可以是任何可测量的环境特征,它随着空间而变化,但是随着时间没有明显变化,正如建筑物及其标识、磁异常,和地面高度的变化等。机会导航需要可供工作的特征数据库、WiFi接入点位置和电话信号场强地图,在许多城市已经被列为商用,当然用户也可以建立自己的数据库。机会导航采集数据的一种方法是,当GNSS定位解决方案可被采用时,采集信号和环境特征,而当GNSS经受干扰时,就用这些采集的数据进行定位。另一种方法是人们所熟知的同时定位与绘图(SLAM),目的是同时绘制地图,并且确定用户位置。SLAM利用航位推算测量用户设备通过环境时的相对运动。
协同定位。协同定位,或者肩并肩定位,是一组用户工作在一起确定它们的位置,协同的概念是数据分享和相对定位。数据分享是交换周围的环境信息。这包括GNSS星历、卫星时钟数据、位置和时间偏离,以及地面无线电发射机信号识别信息、环境特征数据和地图信息。协同定位可以明显地增强机会导航。在已知位置上的两个伙伴,应用照相机观测未知的陆地标志,就能确定其位置,将这一信息发送给第三者,后者应用陆地标志帮助其确定自己的位置。分享的数据也可供自己应用。但是完全的协同定位系统也是协同相对定位。用户测量和分享它们间的距离,或者类似信息。这表示信号和特征的应用,其它伙伴的观测有助于确定位置,对于那些无法独立达到定位解决方案的用户尤其有用。
完好性。由于技术业已成熟,用户希望更高的可靠性。这就是说,更加可靠的技术,对于安全关键和使命关键应用是可以实现的,是真实可信的。过去二十年间,严格的完好性框架业已建立在民用航空中,使得GPS能够满足重要的安全需求。其它应用也等待高完好性定位的起飞,如海事运输、先进的铁路信令、基于位置交费安排,和已经虚拟化的安全电子围栏。但是,在这大多数应用中,没有单一的定位技术在所有环境中工作都是完全可靠的。因此,对于导航界的挑战,就是形成多传感器集成解决方案,满足极其重要的完好性要求。






 环球新时空
环球新时空 斗室智库
斗室智库