2016年12月21日 上午12:00:00
在GNSS业界,最为烦心的事情是怕卫星导航信号不好,或者出现信号盲区,无法实现正常的导航定位。哪来的没有信号,也是一种信号之说?前一段时间,《GNSS内参》上的一篇文章恰巧提出了这个有趣的问题。而且找到了一种方法,证明是有效的。所以在此作一推荐。
3D地图辅助GNSS定位,通过利用3D建筑地图来解决卫星能见度降低的问题,提供了最先进的城市定位方法。盲区匹配是3D地图辅助GNSS的核心,由此用户将接收机处的信号退化与3D建筑地图的预测相匹配。不幸的是,建筑几何结构中的对称性会产生用户所在的多个区域。利用基于集合的技术,我们可以充分考虑这些模糊区域,并单独处理每个区域上的GNSS伪距信息,以改进定位。

城市定位的集合范式
(1)城市环境中的GNSS信号盲区
城市居民和城市自治系统依靠全球导航卫星系统提供绝对定位服务。然而,城市基础设施往往会降低独立的全球导航卫星系统的性能,从而阻碍可靠的定位、导航和授时。建筑物阻挡、衍射和反射视线(LOS)GNSS信号,从而引发非视线(NLOS)和多径效应。在过去的十年里,随着高精度3D城市模型的日益普及,3D地图辅助GNSS(3DMA GNSS)定位获得了广泛的关注。盲区匹配是3DMA GNSS的一种流行技术,以及其他技术,如射线跟踪和基于机器学习的GNSS。最主要的是,GNSS信号盲区是指城市基础设施阻挡GNSS直接视距信号的区域。用户通常使用诸如信噪比之类的信号特征,通过确定用户是在GNSS盲区内部还是外部来细化位置估计。通过这种方式,用户可以将NLOS和完全阻塞的信号转化为用于定位的有价值的信息。
虽然盲区匹配提高了可靠的城市定位,但它也面临着限制其性能的挑战。其中两个关键挑战:一是沿着街道的精度通常不可靠,二是多个得分较大的位置会产生多模态和模糊定位。随着城市场景的密集,位置模糊性往往会恶化。但是应该指出,在多星座GNSS条件下,真正的 GNSS信号盲区,其覆盖面积会越来越小,这样给盲区匹配定位技术带来了希望,而且受到人们的重视。提高盲区匹配的沿街精度和减少定位中的多模态模糊度的一种可能策略是将盲区匹配与GNSS伪距融合。
(2)基于集合的定位范式
虽然过去的3DMA GNSS技术是成功的,但它们依赖于以基于网格的方式制定盲区匹配,这可能不如集合方法适合一些用户。盲区匹配可以用以下基于集合的术语进行几何建模:用户要么在阴影中(这是2D集合或多边形),要么在阴影外(这是补集)。基于集合的公式方便地避开了对位置候选网格或高程和方位角离散化的需要,这在上述基于网格的工作中一直存在。即使是建筑物也被存储为三维集合中,利用约束区域图的数学方法,可以使用快速的矢量连接运算来有效地在线计算盲区。为了合并GNSS伪距信息,在研究工作中利用基于集合的框架形成了一种基于集合的方法来处理GNSS伪距离。然后,我们开发了一个基于集合的迭代滤波器,该滤波器利用了GNSS伪距的基于集合的形式。

(3)基于集合的GNSS伪距处理
与城市定位中的其他工作不同,利用伪距离测量模型的四维圆锥几何来处理基于完全集合的框架中的伪距离测量。四维圆锥几何的探索在很大程度上受限于GPS分析文献。将时钟偏置、环境偏置(例如,多径)和附加噪声组合为一个单独的术语,称为范围偏移。当接收器时钟偏置主导距离偏移、信号为LOS或当偏置在卫星之间类似地正相关时,卫星相关距离偏移在卫星之间近似共享。接收器状态反映接收器位置和整个范围偏移。在盲区匹配中,隐含地假设盲区投射到地平面上,地形辅助显著改善了城市定位,尤其是在处理伪距时。在地形辅助中,用地形模型的信息和接收器高度的粗略估计来约束接收器状态。该地形信息限制用户状态,从而产生三维双曲面。这表示与卫星位置、校正的伪距和地形一致的所有接收器状态,称之为卫星伪距一致性(SPC)。卫星高程描述了地面水平面与垂直面之间的权衡。因此,双曲面的形状随着卫星仰角的变化而变化,其中双曲面在峰值附近的斜率随着高程的增加而变浅。
(4)真实世界数据的性能
研究过程中,测试了所用方法的两个部分的影响:(1)基于服务水平加权集的SPC预测和(2)基于迭代集的滤波器。通过将SPC投影与单独的盲区匹配(即ZSM)进行比较来评估第一部分。通过比较混合模型和未加权混合模型中的服务水平加权来进一步评估第一部分。通过比较单步滤波器和迭代滤波器来测试该方法的第二部分。用小AOI和大AOI验证了滤波器的性能。对于实验平台确立和LOS分类器训练,以及基于集合的盲区匹配结果表明,基于集合的位置模糊度可以加以降低。表现最好的组合是所提出的方法,该方法从ZSM开始,使用SPC投影,用LOS分类器对测量进行加权,并随着时间的推移迭代处理伪距。使用该数据集提出的方法,在所有时间步长中都正确地到达了具有用户位置的集合。并且还演示了迭代滤波器、SPC投影和LOS分类器如何协同工作以实现所寻求的性能。首先,嵌入SPC投影中的伪距离信息对于选择正确的不相交集至关重要。
(5)结论
提出了一种新的基于集合的城市定位范式。该方法用计算高效的基于集合的操作重新表述了过去的3D映射辅助技术。在基于集合的盲区匹配中,可以在不进行任何离散化的情况下完全表示GNSS盲区,以更好地捕捉盲区几何图形。然而,保留了类似的模糊位置问题,即盲区匹配会在用户所在的位置产生多个不相交的集合。为了解决这一问题,提出了一种完全基于集合的方法来减少基于集合的盲区匹配中的位置模糊性。提出的方法有两个关键组成部分:(1)以有利于基于集合的操作的方式处理GNSS盲区;以及(2)通过基于集合的操作迭代地过滤伪距信息,以从盲区匹配中识别最可能不相交的集合。通过在旧金山密集的城市金融区收集的智能手机数据验证了这一方法,证明了模糊度减少方法的两个部分对于识别正确匹配用户位置的不相交集至关重要。
中国北斗,我国自主建设的卫星导航系统。自1994年北斗一号立项以来,历经二十六载,从无到有......

近年来,我国在遥感测绘、定位导航、科学实验等中高轨道卫星应用领域取得了一系列重大成果,如风......

据俄罗斯国家航天集团公司中央机械制造科学研究所刊物《航天与火箭制造》登载的文章称,该研究所......
几乎是前后脚,中国北斗在过去一个月内迎来两则重磅消息。8月31日,来自中俄卫星导航重大战略......
展望未来30-50年,我们将以卫星导航系统的时 空为基石,集成光学、声学、电学、磁学、机......

2017年11月,北斗三号首批组网卫星以“一箭双星”方式成功发射入轨,截至目前已有16颗卫......

据河南省测绘地理信息局网站消息,商丘市新建的13座北斗导航定位基准站全部建成并通过省级验收......

近日,深圳市在南山区西丽街道、桃源街道、宝安区新安街道、西乡街道启动了共享单车高精度定点停......

这似乎是个老问题,实际上也是个新问题。因为智能的问题,现在与无人驾驶密切相关,引出一堆新问......
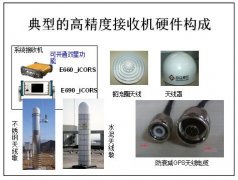
接收机通常有接收机天线、射频(RF)部分、基带部分、电源部分和控制显示存储部分组成。接收机......
 环球新时空
环球新时空 斗室智库
斗室智库