2016年12月21日 上午12:00:00
上一期介绍《自然》的地面网络定位系统(TNPS)文章,主要强调在GNSS受阻情况下,在城市峡谷中通过有无线网络组合和通信导航融合技术来解决导航难题,摆脱了大规模建网的基建投入的限制。无独有偶,近日,在《GNSS内参(InsideGNSS)》杂志上刊登一篇文章,直言用组合两种技术的简单方法其寻求室内定位的将来(The Future of Indoor Positioning: A Simplified Method Combining Two Technologies)。而且,这两种技术也是别出心裁,不落俗套,更是不需要明显的硬设施投入。因为所用的两种技术:一是利用机会信号,以多径效应协助定位;二是利用深度神经网络(DNN)学习分析场强指纹。两种技术结合形成的简单方法,竟然实现了低复杂性和高性能。利用多径,简直是化腐朽为神奇之美事。

在具有良好天空视野的场景中,GNSS可以提供满足多种服务和应用性能要求的定位。然而,在城市峡谷中,尤其是在室内,由于被接收信号微弱,还受多径和非视距(NLoS)传播或墙壁与建筑物的阻碍,它们的定位性能会急剧下降。虽然浩若烟海的文献中有大量的室内定位方法,但目前还没有一种方法或技术真正成为未来的室内定位方式。这里重点介绍基于无线电的定位系统。这些系统的一大优势是,在人口稠密的地区,无线电信号往往非常丰富。例如,第五代(5G)或无线局域网(WLAN)信号可用于室内场景中的定位。与GNSS信号相比,它们在接收机处的功率通常明显更高。然而,如果使用标准定位方法,当使用这种信号时,多径和NLoS传播也会降低定位性能。在此,反其道而行之,恰恰利用多径协助定位,真所谓道高一尺魔高一丈。
在多路径辅助定位方案中,利用多路径传播来定位用户。散射和反射信号分量被视为来自所谓虚拟发射机的视距(LoS)信号。虽然这些虚拟发射机的位置取决于场景并且通常是未知的,但是它们可以通过同时定位和映射(SLAM)与接收机位置一起估计。最近引入了一种称为协作信道SLAM的多径辅助定位方法,其中用户通过交换估计发射机位置的地图来进行协作。这里发射机是指物理发射机和虚拟发射机的通用术语。
单用户信道SLAM分两步工作。在第一步骤中,信道估计器估计并跟踪随时间变化的接收信号的信号分量的参数。在第二步中,这些信道参数在Rao Blackwell化粒子滤波器中用于联合跟踪接收机位置,并估计发射机的位置。在协作信道SLAM中,经历相同场景的多个用户通过交换估计发射机位置的地图来协作。但是,每个用户都在本地坐标系中,相对于其他用户的坐标系具有未知的相对旋转和平移。估计这些变换参数和发射机对应关系是协作信道SLAM的关键要素,并由术语映射匹配表示。根据上下文,术语用户可以指代用户或用户配备的无线电接收器。

值得指出,定位误差和映射的熵在协作信道SLAM中收敛。然而,该方案在信道估计、粒子滤波和地图匹配方面都具有很高的复杂性。
指纹方案代表了一种不同的室内定位方法,分两个阶段工作。在离线阶段,收集已知位置的特征并将其存储在数据库中。例如,这些特征可以是无线信道上的信息或磁特征,它们被称为指纹。当使用诸如WLAN或蓝牙之类的无线无线电信号时,接收信号强度指示符(RSSI)值或信道状态信息(CSI)通常被用作指纹。在在线阶段,用户可以通过将其所在位置的指纹与数据库进行匹配来定位。
利用无线信号的指纹方法可以很容易地建立在现有基础设施(如WLAN系统)之上。关键假设是无线电信号的某些特征与某些位置相关。一方面,假设在附近地点采集的指纹在某种程度上彼此接近。另一方面,在距离彼此较远的位置采集的指纹在该度量中被假定为较远。因此,指纹是一种数据驱动的方法,不需要复杂的模型。例如,对于基于到达时间(ToA)的定位方法,发射机和接收机之间不需要同步。指纹识别方案的一个主要缺点是离线阶段的特征收集繁琐。为了获得良好的定位性能,需要在多个位置收集指纹。需要为每个指纹存储精确的位置,这需要离线阶段的精确定位能力。此外,环境的变化会显著降低定位性能。更新指纹数据库以适应这种变化可能需要很多努力。因此,需要从事某些研究,旨在在线阶段更新指纹。
最近,来自机器学习的技术已被用于提高性能并弥补指纹识别的缺点,包括k近邻(kNN)、支持向量机(SVM)和深度神经网络(DNNs)。在后一示例的离线阶段,指纹和用户位置原则上用于训练DNN。在指纹识别的在线阶段,对神经网络的评估产生用户位置。与竞争方法相比,DNN往往具有更好的泛化能力。

这里提出了一种新的混合方案,将协作信道SLAM与使用DNN的指纹识别方法相结合。该计划分两个阶段实施,将由DNN-CC-SLAM表达。在离线阶段,用户通过合作的Channel SLAM浏览场景。来自信道估计器的ToA估计连同各自的估计位置一起存储在指纹数据库中。在足够数量的ToA指纹可用后,训练DNN以根据这些估计的ToA预测用户位置。因此,指纹不是用地面实况定位系统以经典方式收集的,而是来自协作信道SLAM的干扰参数。特别是,不需要安装外部硬件或设备来收集或更新指纹。指纹采集可以被视为一种众包计划。在在线阶段,进一步的用户可以利用经过训练的DNN进行定位。为了在在线阶段估计信号分量的ToAs,存在具有低复杂性的估计器。因此,DNN-CC-SLAM的在线阶段比协作信道SLAM的复杂程度低得多。
与标准指纹方法相比,这里使用外部基础设施简化了指纹方案中繁琐的特征收集,以获得精确的定位参考。指纹数据库可以不时地或在需要时通过协作信道SLAM进行更新,例如,由一个或多个专用用户或由场景中导航的特定百分比的用户进行更新。
在这里的新方法DNN-CC-SLAM中,将SLAM方案与指纹结合。在协作信道SLAM中,多个用户使用虚拟发射机基于信道脉冲响应来估计其位置,并且信道参数被估计为干扰参数。在DNN-CC-SLAM的离线阶段,这些干扰参数和估计的用户位置用于训练DNN。在在线阶段,用户可以利用经过训练的DNN来估计他们的位置。虽然协作信道SLAM具有较高的计算复杂度,但DNN-CC-SLAM中的在线阶段的复杂度要低得多,而定位性能与协作信道SLM的数量级相同。
中国北斗,我国自主建设的卫星导航系统。自1994年北斗一号立项以来,历经二十六载,从无到有......

近年来,我国在遥感测绘、定位导航、科学实验等中高轨道卫星应用领域取得了一系列重大成果,如风......

据俄罗斯国家航天集团公司中央机械制造科学研究所刊物《航天与火箭制造》登载的文章称,该研究所......
几乎是前后脚,中国北斗在过去一个月内迎来两则重磅消息。8月31日,来自中俄卫星导航重大战略......
展望未来30-50年,我们将以卫星导航系统的时 空为基石,集成光学、声学、电学、磁学、机......

2017年11月,北斗三号首批组网卫星以“一箭双星”方式成功发射入轨,截至目前已有16颗卫......

据河南省测绘地理信息局网站消息,商丘市新建的13座北斗导航定位基准站全部建成并通过省级验收......

近日,深圳市在南山区西丽街道、桃源街道、宝安区新安街道、西乡街道启动了共享单车高精度定点停......

这似乎是个老问题,实际上也是个新问题。因为智能的问题,现在与无人驾驶密切相关,引出一堆新问......
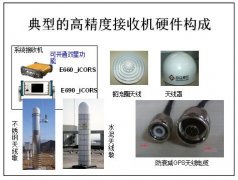
接收机通常有接收机天线、射频(RF)部分、基带部分、电源部分和控制显示存储部分组成。接收机......
 环球新时空
环球新时空 斗室智库
斗室智库