2016年12月21日 上午12:00:00
数十年来,或者说是GPS问世以来,人们一直在不断地讨论定位系统的性能指标,但是至今一直不甚了了。因为每个系统都存在局限性,所以GPS当时定义的四大指标:可用性、精度、连续性和完好性。人们总觉得这四项性能指标,不太完整,同时又有一定程度的重复嫌疑。而且,从系统层面来说,其完好性性能也长期没有解决。后来,发现GPS存在信号脆弱性软肋,于是相当长一段时间以来,人们一直从事弹性PNT研究开发,目的是提高GNSS应用与服务终端的坚韧性,人们从室内外全覆盖(或者说是泛在PNT)的概念,来探讨韧性PNT技术与方法,其系统的解决办法,在近些年来得到重大进步和突破。首先是GNSS多星座的兼容互操作让GNSS应用服务升级到一个新的层次;接着,多传感器多信源融合、天地基融合、室内外融合、导航与通信融合,让泛在PNT的实现铺平了一条康庄大道;未来,无所不在的时空信息应用服务,打开了个崭新天地,为智能信息产业和中国服务国家品牌建设形成,奠定扎扎实实的发展基础。
当前,首当其冲的是要实现可信定位。何谓可信定位?解决定位问题,是实现自主化(或者说是自动化)平台开发的关键步骤。为了实现高水平的自动驾驶,定位解决方案必须在所有的环境中(包括复杂的物理遮挡、电磁干扰、信号衰落、多径效应和非视距传播等条件下,以及GNSS信号可能会被降级或拒阻的挑战区域中)都能够实现高精度、高精准、高可靠定位,并且保证始终可用。可信定位在实现飞行器、机器人和自动驾驶汽车等无人系统和自主系统中,将具有广泛的安全、社会和经济效益。
GNSS信号传播复杂环境和恶劣的天气条件下,需要融合多种传感器,来保持无人系统(如自动驾驶汽车)自主平台的车道级精度,同时又不会产生高成本阻碍广泛采用。雷达是多传感器集成方案中的一个具有吸引力的选择,因为它对恶劣天气具有鲁棒性并且对照明变化不敏感。
AUTO的多雷达集成版本,在紧密的非线性集成方案中使用惯性导航、实时运动学GNSS、里程计和高清地图匹配,以及多个雷达传感器。AUTO可以在所有城市环境下实时可靠地生成高精度和高速率的导航输出。在模拟GNSS中断期间的关键性能指标量化中,找到了保持长时间高精度的解决方案。
多传感器融合,例如将GNSS与惯性导航系统(INS)和里程计集成,可以利用不同传感器的互补优势和劣势,在所有可用测量的情况下提供最佳解决方案。实时动态(RTK)GNSS是一种有价值且准确的信息来源,可在具有可靠RTK覆盖范围的区域提供高达厘米级的绝对位置更新。然而,GNSS在城市深峡谷中、地下停车场和隧道内仍然存在多路径和遮挡与非视距传播等一系列问题。INS始终可作为完全独立的传感器使用,并提供超过100Hz的高速数据更新的解决方案,但它会随着时间的推移而产生漂移。这对于基于低成本微机电系统(MEMS)的传感器来说,尤其是个十分重要的问题,GNSS高精度定位则可以纠正这些漂移误差。不幸的是,在恶劣的城市峡谷环境中,GNSS信号遇到长时间的信号衰减或不可能正常应用,使得保持车道级高精度定位变得非常具有挑战性。因此,正在探索寻找另一种感知传感器,作为独立信息源,并且可以集成到融合堆栈中。常见的这种感知传感器,包括摄像头和激光雷达等。它们可以提供场景的详细信息,这对于对象检测或地图匹配非常有用。但是,相机会受到来自背光物体和场景的光线不足的影响,而恶劣的天气的影响往往成为该传感器的致命弱点。而雷达不受这些固有弱点的影响,无论天气条件如何,都可以提供可靠的测量。雷达的缺点,特别是从地图匹配的角度来看,是数据的稀疏性和激光雷达的低角分辨率。最近的技术进步已经减轻了其中一些限制,使雷达成为本地化定位的可行选择。即使在杂乱的场景中,最先进的成像雷达,也可以在多个动态目标上以高更新率生成远距离高分辨率信息。测量在4D域中进行,这包括距离、多普勒、方位角和仰角。
AUTO由INS、GNSS、里程表和雷达与高清(HD)地图在一个紧密集成的解决方案中融合而成,以提供车道级精度。AUTO软件灵活支持多雷达配置,实现场景级360度覆盖,提升定位精度。除了使用雷达系统进行定位外,在使用众包技术时也可以使用雷达测绘。
AUTO是一种实时集成导航系统,可为自动驾驶汽车和机器人平台提供准确、可靠、高速更新和连续(始终可用)的导航解决方案。该软件在其紧密的非线性集成方案中利用多项专利,将来自多个成像雷达的信息与INS/GNSS/里程计解决方案融合在一起。
INS始终可用并支持100Hz的高速输出。此外,基于MEMS的传感器,可以以可承受的价格获得并具有大批量可用性。基于这些优点,INS被用作AUTO导航的核心。同时执行准确的系统级时间同步以补偿传感器延迟。通过紧密的集成方案,AUTO解决方案可以以100Hz的频率输出完整的3D导航解决方案,使用所有可用的测量来计算可能的最佳解决方案,即使某些传感器的更新率较低。

AUTO以可扩展的成本为自主陆基平台提供高精度和可靠的定位。集成解决方案可以以与更昂贵的高端系统相媲美的竞争方式运行,在所有环境和条件下实现分米级精度的高速率解决方案。借助系统可用的传感器阵列和冗余信息,它还可用于完整性监控应用。INS的自洽性始终允许系统在其他传感器出现故障的情况下依靠INS定位。AUTO经过优化,可在其组件中使用汽车级MEMS IMU,解决方案的其它组成元素,包括高精度GNSS(RTK/PPP)、成像雷达、里程计/车速表(DMI/CAN/OBD-II)、气压计等。(关于AUTO及多传感器整体解决方案,详见《InsideGNSS》的文章“Multiple Imaging Radars Integrate with INS/GNSS via AUTO Software Reliable and Accurate Positioning for Autonomous Vehicles and Robots”)。
中国北斗,我国自主建设的卫星导航系统。自1994年北斗一号立项以来,历经二十六载,从无到有......

近年来,我国在遥感测绘、定位导航、科学实验等中高轨道卫星应用领域取得了一系列重大成果,如风......

据俄罗斯国家航天集团公司中央机械制造科学研究所刊物《航天与火箭制造》登载的文章称,该研究所......
几乎是前后脚,中国北斗在过去一个月内迎来两则重磅消息。8月31日,来自中俄卫星导航重大战略......
展望未来30-50年,我们将以卫星导航系统的时 空为基石,集成光学、声学、电学、磁学、机......

2017年11月,北斗三号首批组网卫星以“一箭双星”方式成功发射入轨,截至目前已有16颗卫......

据河南省测绘地理信息局网站消息,商丘市新建的13座北斗导航定位基准站全部建成并通过省级验收......

近日,深圳市在南山区西丽街道、桃源街道、宝安区新安街道、西乡街道启动了共享单车高精度定点停......

这似乎是个老问题,实际上也是个新问题。因为智能的问题,现在与无人驾驶密切相关,引出一堆新问......
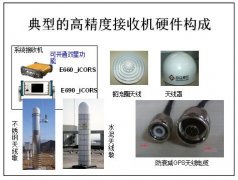
接收机通常有接收机天线、射频(RF)部分、基带部分、电源部分和控制显示存储部分组成。接收机......
 环球新时空
环球新时空 斗室智库
斗室智库