正在收集有关电子设备的信息的过程,以生成特定的签名来识别设备本身。本文研究了全球导航卫星系统接收机指纹识别的潜在策略。从接收机提供的时间序列中计算出若干度量,并将其作为指纹的候选特征进行分析和考虑。结果表明,从接收机时钟漂移计算出的特征是最合适的确定接收机签名的方法。三个时钟派生的度量足以确定接收者的指纹,并建立一个“白名单”来识别接收者。
一些先进的服务依赖于全球导航卫星系统(GNSS)接收器作为数据提供者。全球导航卫星系统衍生的位置、速度和时间(PVT)信息提供应用,如基于邻近的营销、实时旅行服务、交通更新、精确农业、天气报告和路边援助等应用。
全球导航卫星系统接收器在多种受管制的应用中也起着重要的作用。
,CIRO GIOIA,EDUARDO CANO-PONS,
欧洲委员会,联合研究中心(JRC),董事会对空间,安全和移民局,意大利
安全性是一个重要方面。 在道路运输部门,欧洲议会和理事会于2014年2月通过的新的欧盟第165/2014号条例(参见欧洲委员会的额外资源)预见将推出新一代数字转速表(DT),称为“智能转速表 ,“增加了安全机制,GNSS组件和不同的通信接口。 行车记录仪记录驾驶时间,并降低疲倦驾驶员对事故风险较高的车辆进行宽松控制的风险。 对于违反规定和篡改行驶记录仪系统,有潜在的经济诱因。 在这方面,从可信的GNSS接收机安全提供PVT信息是一项重要的资产。
集成在智能手机中的GNSS接收机也可以用来增加手机银行服务的安全性(参见A.Panjante的
此外,也有可能在智能手机的使用经济利益伪造的GNSS接收机提供的数据。 在这方面,全球导航卫星系统接收器可以被理解为网络中的节点,它们将位置数据提供给更高的服务水平。在行车记录仪、车载单元,即安装在商用车监控司机的驾驶行为的记录设备,实施和提供这些更高的服务水平。在智能手机领域,这些级别的最终用户应用程序:电子欺诈可以利用GNSS接收机和较高的服务水平之间的通信信道可能的漏洞。特别是,GNSS装软件(GFS)的应用程序可以安装在智能手机上伪造用户的位置,以获取个人或商业利益为最终目标。
数据伪造包括截获真正的GNSS数据并用伪造的位置信息替换它们。与在信号空间(SIS)级别操作的干扰和欺骗不同,GNSS数据伪造在接收机级工作。GNSS数据造假试图拦截和篡改的GNSS接收机和应用节点之间的信息。
在全球导航卫星系统欺骗中,可以利用难以伪造的SIS特定的有限元分析来检测攻击。 (见A. Jafarnia Jahromi等特别的额外资源)。类似地,GNSS数据伪造的一种可能解决方案是使用难以伪造的特定于设备的特性。这种方法通常被称为设备指纹识别,它被定义为“收集设备信息以生成设备特定签名以识别单个设备的过程”(Q. Xu等,其他资源)。指纹识别已成为节点伪造或假冒威胁的无线网络领域的重大兴趣。节点伪造包括由攻击者使用合法的凭证进行欺诈活动。GNSS数据伪造类似于无线网络中的节点伪造。
在GNSS欺骗中,通过利用难以伪造的SiS特有的特征,可以检测到攻击
特别是,模拟器或其它设备可以用来模拟一个实际的GNSS接收机。通过这种方式,可以将误导的PVT信息发送到最终的PVT用户。全球导航卫星系统接收机指纹可用于安全增强的应用,至少在一定程度上能够验证GNSS数据的真实性。在这样的应用,依赖于GNSS数据的设备,如行车记录仪的车辆单元,也将从GNSS信息提取独特的特性通过与以前记录的数据比较,可用于验证全球导航卫星系统接收机的身份。
在DT的潜在部署场景中,车辆单元可以在初始安装阶段或定期校准检查期间记录全球导航卫星系统接收机的指纹(例如,按规定定义每两年一次)。安装和校准阶段是在受控环境中(例如,车间)进行,由安装者能够检查GNSS接收机的身份。
设备指纹识别的第一步是选择适当的特性,它应该满足两个基本特性:特征应该很难伪造,并且在环境变化方面是稳定的。
我们研究了全球导航卫星系统接收机指纹的适当特征选择。这个过程包括首先考虑一组冗余的指标,这些指标有识别接收者的潜力。然后使用过滤方法选择指纹,即原始度量集的子集。 我们首先研究与接收机时钟有关的度量,总结作者在2016导航学会GNSS会议上提出的结果,并在附加资源中列出。然后,我们将分析扩展到与时钟无关的特性。
基于时钟的指标
电子设备的指纹识别通常基于明显的缺陷,例如被测试设备的本地振荡器产生的误差。在无线网络中,无线射频(RF)振荡器的缺陷已被用来作为一个伪造特征的可靠源(见,例如,在额外的资源,A. C. Polak和D. L.戈克尔)。
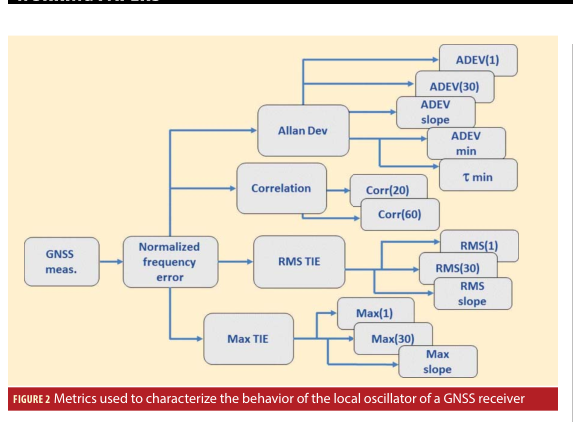
例如,考虑一下如图1所示的正常化频率误差。通过正常化接收机时钟漂移估计作为GNSS接收机的导航解决方案的一部分获得该时间序列,(可能)具有的稳定特性显示出明显的随机效应。这些特征必须被识别并作为特征使用。
我们分析了在文献中采用几种指标来描述时间/频率源行为。
通过正常化时钟漂移估计作为大众市场的导航解决方案的一部分,
如图1所示的GNSS接收机得到的正常化频率误差
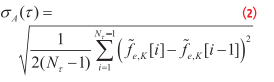
所考虑的指标如图2所示,也描述了评估采用的方法的主要内容。 GNSS测量用于计算用户PVT解决方案。 然后从时钟偏差dt计算标准化的接收机频率误差f[n]
这里n是时间索引,T是
五个采样率。 f [n]也可以通过GNSS中心频率正常化时钟漂移来计算,在这种情况下fL1 = 1575.42 MHz。 图1所示的时间序列是通过对静态数据采集过程中估计的时钟漂移进行归一化得到的。 值得注意的是到时钟漂移和时钟偏差是从不同的可观测量,多普勒测量和伪距计算的。 因此,它们有不同的特点。 我们在ION 2016 GNSS +会议上发表的论文中指出,由多普勒测量得出的归一化频率误差导致对环境变化更稳定的特征。 多普勒测量受不同误差源的影响较小,因此对于接收机特征的确定应该是优选的。
然后使用归一化频率误差来计算不同的度量,例如Allan 偏差定义(参见S. Bregni,额外的资源):)
其中T = KT,通常是基本采样间隔的整数倍。 fem是归一化频率误差的滤波和降低采样版本。 尤其是,
因此,| 是在K个样本上平均的归一化频率误差。 (2)中的N是在滤波和采样后可用的频率误差的数量。
偏差是取决于平均时间T的曲线。由于这个原因,它不能被直接用作指纹的特征。 因此,描述艾伦偏差行为的总结统计是必要的。 我们选择T = 1秒和T = 30秒时的Allan偏差,T = 1秒和T = 30秒之间的曲线斜率,最小值以及对应于最小艾伦偏差的平均时间。 通过这种方式,从Allan Deviation获得了五个特征。
对于通常用于表征时间和频率源的其他性能曲线进行类似的处理。 我们考虑了均方根时间间隔误差(RMS-TIE),最大时间间隔误差(MTIE)以及归一化频率误差样本之间的相关性。 至于艾伦偏差,总结统计被选中。 这样总共确定了13个特征。 有关所选不同特征的更多详细信息,请参见D. Borio等人。
与时钟无关的指标
许多大众市场接收机只提供用户的位置和速度。 在这种情况下,不可能计算上面讨论的基于时钟的度量。 为此,我们考虑了接收机识别与时钟无关的特性。 术语“不相关的时钟”被用来表示从位置和速度时间序列导出的特征,即不包括接收机时钟偏差和时钟漂移的数据。 分析的基本原理是影响时钟的错误分量和导航解决方案中的垂直分量通常应该高度相关。 这样,也可以从导航解决方案的空间分量中提取接收机指纹的有效特征。
我们采用类似于时钟相关功能的方法。 特别是上一节描述的特征是使用速度和位置分量计算的。 例如,艾伦偏差是使用速度时间序列计算的。 在这种情况下,Allan偏差不能表征接收器振荡器的稳定性,但决定了速度解的质量。
从进行的分析中可以看出,与时钟无关的特性一般不与时钟相关。 图3比较了使用两个不同接收器的不同PVT分量计算的Allan偏差。 该图的左栏考虑使用基于多普勒的时间序列计算的Allan偏差曲线。 由于速度分量和时钟漂移具有不同的归一化,为了使每个图的初始点重合曲线已经移动。
特别是,艾伦偏差被转移到一开始。 在图3的第一行中考虑的一个接收机的TE [1 – 100]的不同曲线之间发现了Allan偏差之间的良好匹配。然而,对于考虑在其中的另一个接收机,相同的结果是不正确的。
底部一排。 尽管在考虑伪距导出的度量时发现更好的匹配(见图3的右列),但与时钟无关的度量传递通常基于时钟的对应不同的信息。 因此,这个结果是从时钟偏差获得,而漂移不能直接应用于从位置和速度时间序列中提取的特征。
过滤和特征选择
在选择冗余候选特征集之后,有必要应用选择过程以确定用于分类的最有效的特征子集。 特征选择算法大致分为过滤和包装方法(参见G. Chandrashekar和F. Sahin的综述,其他资源)。 前面的方法使用成本函数来排列不同的特征子集。 后面的技术围绕分类器/预测器(即所选特征子集的最终“用户”)包围选择过程。 特别地,包装方法选择具有最高分类性能的特征的子集。
我们采用了一种过滤方法作为复杂性和性能之间的折衷。 为了应用滤波方法,首先需要对从GNSS接收机获得的时间序列进行预处理。 这里应用的预处理在图4中简要概括。为特征计算收集的时间序列首先被分割成有限持续时间的数据块。 每个数据段将被用于计算上述度量的不同实现。 这样就获得了几个特征向量的实现。 请注意,不同型号的几个接收机已被用于下一节中所述的分析。 每个接收器模型代表一个类。 以这种方式,为不同的类别获得特征向量的几个实现。 特征向量的分量是不均匀的,并且可以假定明显不同的值。 因此,规范化是必需的。 这里使用以下标准化:
其中xf表示第k个特征的第j个实现。 划线符号用于表示标准化数量。 在下文中,将使用额外的索引来表示将用于表示特定类或接收者类型的成员资格。考虑所有接收机类别的所有特征实现,获得最大值和最小值。 使用方程式(4),获得正常化的特征向量,其中每个分量取[0,1]范围内的值。
数据预处理后,应用特征过滤。 这里考虑的分数函数是
其中F表示分析中的子集,并且d(F)是类别i和j之间的类间距离。 d(F)是第i类的组内距离。 类内和类间距离是根据归一化特征定义的(4)。 特别是,类内距离被定义为
其中N 是实时特征的数量,对于第i类/接收器类型,Xi’j表示第k类正常化分量,第i类的特征向量的实现。 是i类的特征均值向量的第k类组成。 方程式(6)量化了一个类的传播。 类间距离定义为
并描述两个类之间的平均距离。 图5提供了这里定义的不同数量的几何解释。 它显示得分函数(5)是类之间的最小距离和较大的类大小之间的比率。 因此,选择子集F是为了使类之间的扩展最大化,并使类维度最小化。
设置
前面部分描述的理论框架已经使用在两个数据收集期间收集的数据来实施和测试。测试在不同的周和不同的信号条件下进行。选择了两种不同的情景来评估环境变化的特征稳定性。
第一个测试是使用位于意大利伊斯普拉联合研究中心(JRC)的欧洲微波签名实验室(EMSL)的大地测量天线进行的。 EMSL是该地区最高的建筑物,天线周围没有障碍物。因此,第一次测试是在露天条件下进行的。
第二个测试是使用安装在JRC校园办公楼屋顶上的天线进行的。在这种情况下,建筑物被更高的建筑物和高树所包围造成的多径、衰落、创建干扰信号环境。
用于数据收集的天线位置如图6所示。
这两个数据收集设计和采用了一个通用的设置。在每个设置中,使用RF分离器将几个接收机连接到相同的天线,并用于收集每个实验几乎四天数据。
每个数据收集的长度证明了上一节介绍的数据分段。 接收机以1赫兹的数据速率记录原始GNSS可观测值,即伪距和多普勒频移。 使用不同类型的接收机,包括大众市场和专业多星座接收机。 为了有相同的条件,只有GPS测量数据被用于数据分析。 而且,所有的接收机都采用了一套通用的星历表。 这样,不同的接收机采用了相同的运行条件。
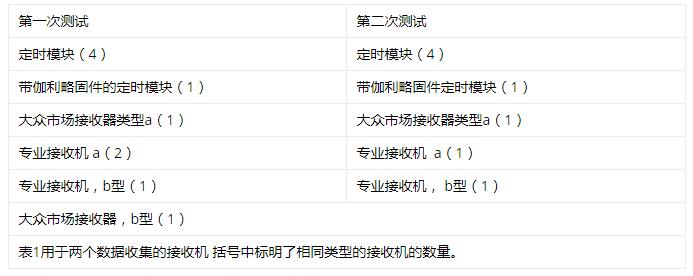
表1中提供了两次测试中使用的接收器列表,以及相同类型的设备数量。 设备的实际型号可以在制造商部分找到。
两个数据收集使用了五个GNSS定时模块。 其中一个更新了最新的固件,可以处理伽利略信号。固件更改对相同类型的设备的影响是更新履行分析。
实验结果
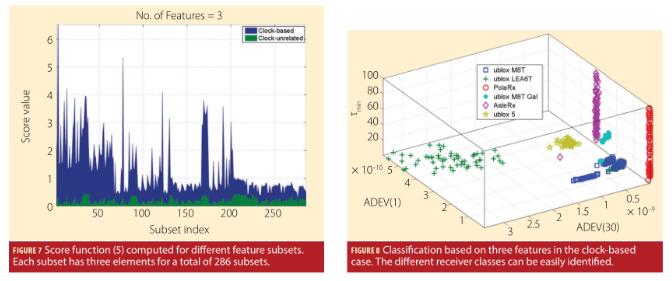
在上述两次测试期间收集的数据被用于特征选择。 特别考虑了两个和三个要素的子集。 对于每个子集,计算得分函数(5)。 我们只考虑由多普勒测量得到的特征,即从速度/时钟漂移解算得到的特征,因为这些类型的可观测量对于误差和环境变化具有更高的稳定性。 已经使用一小时的数据段(即,3600个元素)来计算特征。
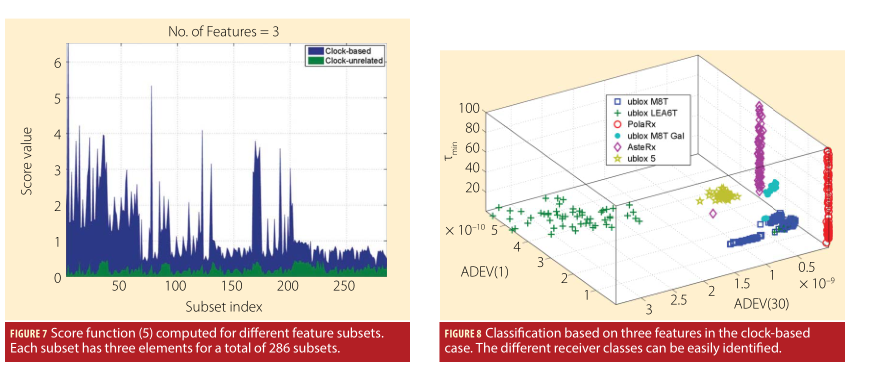
在图7中分析了三个元素的子集,其中考虑了基于时钟的和与时钟无关的度量。
在基于时钟的情况下,从接收器时钟漂移计算特征。 在与时钟无关的情况下,使用速度解的上行分量。
由于最初考虑了13个特征,因此总共发现了286个子集。 图7中的横坐标是用于枚举三个元素的不同子集的索引。 从图7中报告的结果可以清楚地看出,基于时钟的特性明显优于其与时钟无关的特性。 在基于时钟的情况下,得分函数的最大值大于6。 这意味着,对于导致最大(5)的特征子集,最小的类间距离比最大的类间距离大6倍以上。 通过这种方式,类/接收器类型被清楚地分开,并且可以执行有效的聚类。
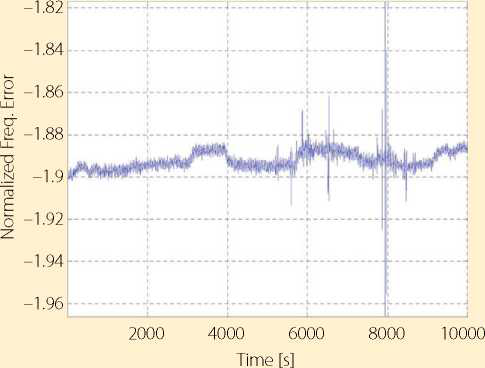
这一事实在图8中进一步分析,显示了使用导致(5)的最大值的三个特征形成的簇。 这些特征全部来源于Allan偏差曲线,并且是在T = 1秒和T = 30秒处的Allan偏差以及导致最小Allan偏差值的平均时间。 在图8所示的特征空间中可以很容易地识别不同的接收器。来自一家制造商的专业接收器在Allan Deviation方面显示了与大众市场器件相关的增强的性能。 鉴于不同的细分市场,即专业接收方,这是预期的。 类型a的大众市场接收器是在两个数据收集中显示出显着不同行为的唯一设备。
天空场景,这个接收器具有与上面提到的定时模块相似的特性。图8还显示固件更新会影响接收者的行为。当考虑到伽利略固件更新的一个设备的行为时,这一事实清晰地出现了:由该设备确定的特性定义的群集与标准定时模块明显不同。
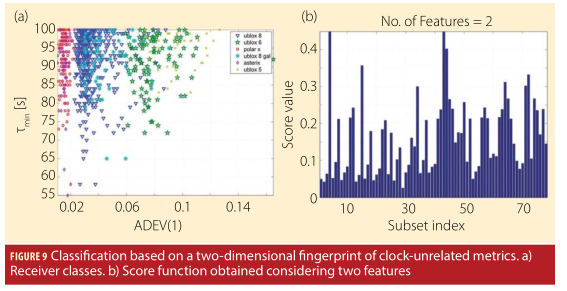
在与时钟无关的情况下,得分函数总是低于0.5。这意味着类之间在时钟无关的特性上有显着的重叠。在图9中进一步研究了这个事实,显示了在二维情况下的特征选择结果。为了清晰起见,这里考虑了二维特征向量。当考虑三维情况时,特征空间表示相当混乱,结果的解释更加困难。此外,在图9右侧部分报告的得分函数表明,在与时钟无关的情况下,从两个特征的指纹移动到具有三个元素的向量时,没有显着的增益。
图9左边部分所示的接收机类表明,不同类型的制造商的接收机具有相似的特性。甚至当一个额外的功能是包括指纹时重叠图9a观察类之间的折中得分不增加。然而,观察结果表明,时钟无关的功能可以允许识别差异。
年4月获得意大利都灵理工大学电气工程博士学位。从2008年1月到2010年9月,他是加拿大卡尔加里大学PLAN小组的高级研究员。自2010年10月以来,他一直是欧洲委员会联合研究中心的一名科学官员。他的研究兴趣包括数字和无线通信领域,定位、导航。 Ciro Gioia 2009年从意大利帕斯诺普大学获得航海科学理科硕士。2014年,在同一所大学他成功地扞卫了他的博士论文。从2013年5月到2014年4月,他在欧洲委员会联合研究中心(JRC)客座研究员。从2014年5月到2016年6月他在JRC担任外部顾问。目前,他是在欧洲委员会JRC担任科学技术项目主任。他的研究兴趣集中在定位和导航方面特别着重测绘学。
Eduardo CanoPons2002获得了巴塞罗那加泰罗尼亚技术大学通信硕士学位。2006年他获得了该校的博士学位。
的研究领域是无线网络干扰建模和全球导航卫星系统和无线通信的信号处理技术。在欧盟委员会联合研究中心担任空间、安全和迁移主管。在2007年作为科学主任加入欧盟委员会联合研究中心前他曾在爱立信、朗讯科技休斯网络系统和芬梅卡尼卡担任高级技术建筑师和系统工程部经理。他目前在智能运输系统和物联网的应用的研究主要集中在导航、无线通信和安全方面。在无线通信领域,导航和安全领域与G i anmarc o Ba ldini的合着论文60余篇。
国立大学-博士生导师。habil。h.c. Guenter W. Hein博士
他是慕尼黑卓越的FAF大学名誉教授。2008和2014间他是ESA EG NOS和全球导航卫星系统演进计划部,负责开发第二代EGNOS和伽利略。Hein教授还组织ESA / JRC GNSS国际夏季学校。他是一年一度的慕尼黑卫星导航峰会的创始人。Hein教授了300多篇科技论文,开展了200余项科研项目,培养了70多名博士,2002年他获得了美国航海研究所每年在世界上只授予一个人的最高的航海奖,着名的 “卫星导航持续和重大贡献” 开普勒奖“。2011年G. Hein成为个美国人。2013年布拉格科技大学对他卫星导航的成就授予他荣誉博士。自2016以来,他是慕尼黑航空航天局执行董事会成员。












 环球新时空
环球新时空 斗室智库
斗室智库