GNSSAugmentation System and Technology
Abstract:
Accuracy, Continuity, Availability and Integrity are major technical specifications used to evaluate theability of GNSS system services and the performance of user equipments. Accuracy describes the precision of positionand time. Integrity is the measure of trust that can be placed on thecorrectness of the navigation system output. Basic GNSS systems such as GPS,GLONASS and BDS are not adequate to meet the accuracy and integrityrequirements for some special applications as aircraft navigation, marinenavigation, law enforcement in transportation, etc. Therefore, augmentationsystems were designed for enhancement of the accuracy and integrity. Typicalaugmentation systems to support GPS are SBAS, GBAS and RBN-DGPS system.Chinais alsodesigning its Ground-Based Augmentation System for BDS.
Based onthe analysis of GNSS accuracy and integrity, the factors which affects theaccuracy and integrity was identified. And GNSS augmentation systems andtechnologies were introduced.
Key words:
Positioning accuracy, Differential technology, IntegrityAugmentation.
1 引言
当今已建成的全球卫星导航系统GNSS(Global Navigation Satellite System)包括美国的GPS、俄罗斯的GLONASS、中国的BDS。GNSS技术是无线电导航技术的一种应用,用户接收机收到卫星发出的导航信号后,通过无线电单向测距手段,获得卫星信号发射天线与用户接收机之间的距离,即“伪距”,当用户接收机同时收到四颗或以上的卫星信号并实现伪距测量后,即可建立并求解导航方程,计算出用户接收机的三维位置和精确时间。
由于GNSS民用信号可供任何用户免费使用,且没有用户数量限制,因此,该技术被广泛应用于与位置、速度和时间有关的各个领域,典型的应用领域包括航空导航、航海导航、航天器测控、武器制导、气象探空、大地测量、位移监测、车辆导航、手持导航、物流跟踪、通信和电力授时等。
评价一个GNSS系统及其用户设备的性能,通常使用四个关键指标,即精度、连续性、可用性、完好性。不同的应用领域,对这四项指标的要求也不同。GPS系统正式启用以来,人们在提高其精度方面花了大量精力,并已证明了GNSS的精度可以满足众多应用领域的需求。但是,目前市场上使用的GNSS接收机,除个别航空型和航海型专用接收机外,其他领域的接收机基本没有完好性指标,然而事实上,在许多应用领域使用GNSS,不但对其精度指标有明确要求,同时还要求满足完好性指标。没有完好性保障的GNSS技术,只能起辅助作用,无法成为那些涉及到法律、财产、生命安全相关领域的主导航手段。因此,随着应用的深入,如何增强GNSS的精度和完好性问题,将成为卫星导航应用领域的主要矛盾。
基于作者曾经从事过的航空导航专用LAAS基站设计经验和增强型WAAS接收机开发经验,并搜集整理了世界各地过去30多年来在GNSS精度和完好性增强方面所采用的技术和所达到的效果,本文综述GNSS精度和完好性增强系统和技术,以期对GNSS增强系统设计人员有所帮助。
1.1 利用增强系统,提高GNSS基本系统的精度
以上四个指标中,人们首先关心的是精度,即定位和授时结果的精确度。例如,GPS基本系统的定位精度为10m,授时精度为100ns,GLONASS和BDS系统的精度与GPS相当。该10m定位精度可以满足大部分用户的使用要求,但是,对于飞机进场、飞机着陆、船舶进港、船舶靠岸、气象探空、大地测量、位移监测、交通执法等领域,该定位精度则不能完全满足应用要求,需要进一步提高;在航天测控、通信授时、相对定位等领域,有些应用场合要求授时精度达到10ns,GNSS基本系统提供的100ns授时精度也不能完全满足用户的需求。因此,需要在现有GNSS基本系统基础上,建设增强系统,辅助提高GNSS基本系统的精度,以满足特定用户的需求。
1.2 利用增强系统,提高GNSS系统基本的完好性
GNSS完好性是GNSS定位和授时可信度的度量。不同应用领域对GNSS完好性要求也不同,例如船舶在远洋航路上航行时,对完好性要求相对较低,依靠GNSS基本系统提供的完好性保障能力,以及用户接收机内部提供的自主完好性监视能力,即可满足使用要求。但是,当船舶进港和靠岸时,基本系统提供的完好性指标则无法满足导航需求,需要建设专门系统,在提高精度的同时,提高GNSS的完好性,保证船舶进港和靠岸的安全。航空导航对完好性的要求高于航海导航,因此,针对航空飞行的全部五个阶段,即航路飞行、终端区飞行、进近(指飞机下降时机头对准跑道飞行的过程)、着陆、地面滑行,都需要在GNSS基本系统的基础上,建设专门的增强系统,在提高精度的同时,提高其完好性,保证飞行安全。在智能交通领域,当基于GNSS定位结果进行违章罚款时,由于涉及到执法问题,也对GNSS的完好性提出了要求。GNSS授时用于发电、输电、变电环节的时间同步,为确保电力安全,要求GNSS系统和用户设备具有较高的完好性。
1.3 GNSS增强系统
实际应用中,往往既要提高GNSS的精度,又要提高其完好性。因此,工程实践中,GNSS增强系统一般同时具有提高精度和提高完好性双重作用。例如,美国针对GPS在航空和航海导航中的应用,建设了星基增强系统SBAS(Space-Based Augmentation System)、陆基增强系统GBAS(Ground-Based Augmentation System)和岸基增强系统RBN-DGPS(Radio-Beacon Network- DifferentialGPS),中国针对BDS在大地测量、位移监测、气象探空、交通管理等领域的应用,正在建设北斗地基增强系统。
1.4 本文内容
本文在分析GNSS精度和完好性指标的基础上,介绍GNSS增强系统和技术。主要内容包括:GNSS的理想精度和实际精度、GNSS完好性及破坏完好性的因素、保障完好性的途径。并介绍几个典型的GPS和BDS增强系统。
2 GNSS的理想精度和实际精度
GNSS系统采用无线电单向测距技术实现高精度三维定位和授时,决定GNSS精度的关键因素是单向测距精度。
2.1 GNSS系统的理想精度
通过获取GNSS信号中测距码相位的方法,测量卫星到用户接收机的距离(伪距),进而确定用户的位置,称为伪距定位;通过获取GNSS信号中载波相位的方法,测量卫星到用户接收机的距离,进而确定用户的位置,称为载波相位定位。
伪距定位的精度决定于接收机的伪距测量精度,伪距的测量精度决定于导航卫星测距码码元长度。以BDS B1民用信号为例,测距码的码速率为2.046MHz,每个码元长度约0.5us,对应的距离为150m,通过接收电路,测量精度可达到1/100码元,伪距测量精度约为1.5m,在假设GNSS的几何精度因子DOP(Dilutionof Precision)为1的条件下,伪距定位的理想精度为1.5m。但是,在GNSS信号的产生、传播和接收过程中,引入了一些外来误差,只有减小或消除这些误差,才可能使伪距定位精度接近其理想精度。
载波相位定位精度决定于接收机的载波相位测量精度,载波相位测量精度决定于导航信号的频率和波长。BDS B1载波频率为1561.098MHz,每个周期对应的距离约为0.19m,通过接收电路,测量精度可达到1/100周期,对应的测距精度为1.9mm,这就是载波相位定位的理想精度,该精度比伪距定位精度高763倍,原因在于载波频率(1561.098 MHz)是测距码频率(2.046MHz)的763倍。
然而,实际应用中,在没有外界辅助增强的情况下,GNSS基本系统的伪距定位精度约为10m,没有外界辅助的载波相位接收机则无法实现定位。为了使GNSS的实际精度接近其理想精度,过去30多年时间里,卫星导航应用领域的主要力量用于提高GNSS的精度。
2.2 影响GNSS精度的因素
在实际使用中,存在诸多外来误差,这些误差直接影响GNSS的定位精度,例如,常见的误差包括:(1)卫星轨道预测误差。该误差与监测站、预测算法、控制站等因素有关,以GPS系统为例,其卫星轨道误差约为2-3m;(2)星上原子钟漂移和偏差。该误差与监测站、预测算法、控制站有关,其数值有时虽然很大,但测控系统通过导航电文将地面估计的时钟慢变化误差发送给用户,因此对用户来说,时钟慢变化误差比较容易处理;(3)星上发射天线相位中心偏差。该误差与星上天线方向图有关,卫星设计完成后,该偏差是固定值;(4)电离层传输误差。该误差与用户所处的位置和时间有关,随白天黑夜的交替而变化,同时受太阳黑子活动的影响很大,在太阳黑子稳定期,用户当地时间下午两点前后,该误差最大可达25m左右;(5)对流层传输误差。该误差与卫星信号路径上大气层温度和湿度有关,可以通过测量用户所处地面温度和湿度估计该误差;(6)相对论效应引起的时钟频偏。由于卫星处于高速运动状态,其重力势能与地面接收机的重力势能不相等,从而影响星上原子钟速率,该影响虽然很小,但对于厘米级或毫米级测量来说,则不可忽视;(7)多路径误差。该误差与星上发射天线、用户接收天线周围信号的反射和折射环境有关,对于静态用户来说,该误差项呈现一定的周期性,对于运动中的用户而言,该误差不可控;(8)接收天线相位中心偏差。该误差由天线方向图决定,可由天线出厂前标定;(9)接收机测量噪声。该误差由接收机内的模拟电路和数字电路产生,往往以高斯白噪声形式出现,一般通过滤波办法消除;(10)SA的影响。该误差是人为加入的卫星星历偏差、时钟参数偏差和星上振荡器抖动,GPS系统的SA误差约为50m(1σ),看似很大,但由于该误差对于所有的用户是相同的,可通过简单的差分手段消除。
2.3 提高GNSS精度的途径:差分技术
差分技术的实质是通过两个或多个观测站同时接收处理导航卫星信号,将各个站点的观测量集中到一起进行处理,从而消除各站点观测到的公共的、慢变化的误差项。典型的误差主要是卫星轨道误差、钟差、空间传输误差。对于多路径、机内噪声等误差,可通过天线、滤波等技术减弱或消除,从而提高GNSS的精度。
不同的差分技术适应不同的应用场合。按照技术分类,分为伪距差分和载波相位差分。按照覆盖范围、应用场合等方式划分,可分为广域差分、局域差分、星基差分、陆基差分、虚拟差分(连续运行参考站)、静态差分、相对差分等。
通过伪距差分技术,可以将定位误差提高到0.5m至3m,即实现米级定位;通过载波相位差分技术,可实现动态厘米级、静态毫米级定位。应该说,通过差分增强,GNSS精度越来越接近其理想精度。
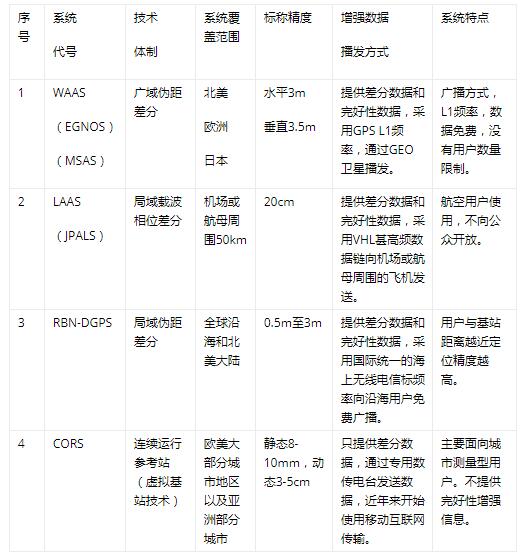
当前典型的GNSS增强系统有:广域增强系统,即覆盖北美的WAAS(Wide Area Augmentation System)、欧洲的EGNOS(European geostationary navigationoverlay service)和日本的MSAS(Multi-FunctionalSatellite Augmentation System);局域增强系统,即陆地机场专用的LAAS(Local Area Augmentation System)和舰载JPALS(Joint Precision Approach and Landing System);全球沿海无线电信标网络差分系统RBN-DGPS;以及主要用于测绘的连续运行参考站系统CORS(Continuous Operational Reference Systems)。
这些增强系统的主要性能指标见表1。
表1、典型的GNSS增强系统
3 GNSS完好性及其增强技术
GNSS完好性是指当该系统不能提供正常服务时,向用户及时报告问题,以确保用户GNSS接收机输出的正确性和可靠性。完好性是对GNSS可信度的度量。
GNSS系统由空间段、运控段、用户段组成,加上信号传播的环境段,构成了GNSS信号生成、传输和接收的全过程。在这四个阶段中,涉及到信号生成、信号同步、信号发射、卫星轨道测控、卫星时钟测控、电离层监视、接收天线信号转换、接收机内部导航解算等众多环节,任何环节出现问题,都有可能导致GNSS定位授时结果的不可信。GNSS完好性增强技术的本质工作,是及时有效地识别、剔出导致GNSS定位授时结果不可信的各类因素。
GPS系统经历了1970s年代和1980s年代近20年的试验验证之后,于1994年底正式向全球提供全功能的导航定位和授时服务。1995年,斯坦福大学GPS实验室针对航空导航对GPS精度和完好性要求,开始了GPS增强技术的研究工作,并先后设计了广域增强系统WAAS和局域增强系统LAAS,并将LAAS技术从陆地机场着陆应用推广到飞机着舰应用,即后来的JPALS。至今,GPS完好性增强方面已积累了20多年的经验,因此,本章将以GPS为例,介绍卫星导航完好性方面存在的问题和主要解决办法。
3.1 GPS基本系统空间段和运控段完好性异常及处理能力
GPS标准服务SPS(Standard Positioning Services)规范中,规定GPS灾难性误导信息HMI(Hazardous Miss-leading Information)发生概率不大于0.002,即每年少于18小时。这些灾难性误导航信息需要及时被检测到,并通知最终用户,否则可能发生重大事故[1]。
据不完全统计,2000年到2010年的10年间,发现空间信号完好性异常超过3000次,接近平均每天一次。
针对GPS空间段和运控段发生的完好性异常,GPS基本系统的做法是:由地面运控系统检测到异常,形成定论和指示信息,把这一指示信息添加到导航电文中,形成新的导航电文,由地面注入到导航卫星,再由导航卫星发送给最终用户,这一过程一般需要1小时,对于那些与生命、经济、财产安全的应用领域来说,这个时间太长。
3.2 破坏GPS完好性的其他因素
空间段和运控段发生的完好性异常主要体现在轨道偏差(实际轨道与预测轨道的偏差)、时钟偏差、姿态偏移等方面。除此之外,信号传输段、接收机、信号接收环境等方面,也可能产生完好性异常,例如电离层风暴、用户设备异常、信号折射和反射引起的多路经、自然电磁干扰或人为电磁干扰、恶意欺骗、接收机内部噪声等。
3.3 外部完好性增强技术和系统
当前,GPS空间段主用卫星是第二代卫星(GPS-II),由于GPS-II卫星系统研制时完好性增强经验尚不够丰富,因此,依靠GPS-II本身的完好性检测能力不足以满足用户的要求。因此,在航空、航海等领域,采用外部增强的方法提高GPS的完好性。例如,针对航空飞行的航路飞行、终端区飞行和一类着陆,建设了WAAS系统;针对进近、二、三类着陆和地面滑行,研制了LAAS系统;针对船舶进港和靠岸,建设了RBN-DGPS系统。
3.4 接收机自主完好性监视技术
由于GPS基本系统的完好性保障能力不足以满足特定用户的需求,建设专门的完好性增强系统的代价又较大,接收机自主完好性监视RAIM(Receiver Autonomous IntegrityMonitoring)技术得以发展。针对不同应用场合,人们开发了各种RAIM算法。例如只利用当前测量值进行一致性检测的“快照法”;同时利用当前测量值和过去测量值的“平均法”或“滤波法”。归根结底,几乎所有的RAIM算法都是基于测量值的一致性检测技术,即利用冗余测量值检测多个测量值中可能存在的不良信息。
3.5 GPS完好性存在的主要问题和发展趋势
当前建设的GPS完好性增强系统,适合航空、航海等专业用户需求。其他应用领域如交通执法、不停车收费、气象探空、电力授时、高精度位置监视和测量、武器制导等领域,完好性问题还没有得到彻底解决。
随着GPS完好性经验的积累,资料显示,未来的第三代GPS系统(GPS-III)空间段和运控段的完好性保障能力会提高。
习惯上,GPS领域经常以10年为一个单位谈论技术进步。业界普遍认为,上一个十年是GNSS芯片的十年,基于完好性问题的复杂性,下一个10年将是GPS完好性的10年。哪个领域成功解决了完好性问题,GPS就可能成为那个领域的主导航手段。
4 典型的GPS增强系统和技术
针对GPS在航空、航海、测绘等领域应用中存在的精度和完好性问题,美国建设了四个GPS增强系统,即WAAS系统、LAAS系统、RBN-DGPS系统和CORS系统。其中WAAS系统主要用于航空导航的航路飞行、终端区飞行和非精密进近,LAAS系统用于飞机I/II/III类精密进近和着陆,RBN-DGPS系统用于近海船舶导航,CORS系统主要用于高精度测绘。
4.1 GPS广域增强系统(WAAS)
WAAS系统是针对GPS在航路飞行、终端区飞行和非精密进近阶段的航空导航应用而设计的增强系统。通过WAAS系统的增强,使GPS的精度和完好性满足航空导航这三个阶段的性能要求。
目前,北美、欧洲和日本分别建设了本地区的WAAS系统,由于建设国家不同,产生了不同的名称,北美地区的WAAS称为WAAS,欧洲的WAAS称为EGNOS,日本的WAAS称为MSAS。由于这些增强系统均通过GEO卫星向用户广播GPS增强信息,因此也统称为星基增强系统SBAS。
北美地区的WAAS系统由25个地面监视站、2个地面主控站、3颗GEO卫星和连接地面站的光纤通信网络组成。WAAS监视站全天候监视GPS星座、GPS信号、以及GPS信号传输环境(如电离层和对流层)的变化,WAAS主控站接收处理各监视站的信息,实时生成GPS位置增强数据和完好性增强数据,通过太平洋上空、大西洋上空和美国内陆中部的3颗GEO卫星,向北美地区的所有用户广播GPS广域增强数据。只要安装了WAAS接收机的用户即可接收使用,免费且没有用户数量限制,因此得到用户和设备生产厂家的广泛接受。WAAS系统设计的另一成功之处是采用GPS L1频率[2]和BPSK调制方式向用户广播WAAS增强数据,这样,WAAS信号和GPS信号可共同使用接收天线和射频信号处理电路,数字基带处理电路也大同小异。这样的系统设计,使WAAS增强型接收机的成本、功耗、体积与普通GPS接收机基本一致,扩大了WAAS的服务领域。
日本的MSAS和欧洲的EGNOS与北美的WAAS工作原理相同,区别在于不同地区的增强系统需要使用该地区的地面监视站和主控站,产生适于该地区的增强信息,并通过该地区上空的GEO卫星向用户广播增强信息。
通过WAAS系统的增强,北美地区的GPS精度已由10m(95%)提高到水平3m(95%)垂直3.5m(95%),完好性满足航空导航规定的要求。WAAS系统已于2003年启用。
4.2 GPS局域增强系统(LAAS)
飞机在I、II、III类精密进近、着陆和地面滑行阶段,对导航精度和完好性提出了更高的要求(完好性异常信息漏报概率不大于5×10-9/15s[3]),GPS基本系统无法满足该要求,因此设计了LAAS系统,目的是使增强后的GPS系统满足飞机精密进近要求,使GPS成为以上三个阶段航空导航的主导航手段。
LAAS系统由增强基站、伪卫星、甚高频数传电台组成。基站内安装了3台GPS接收机,分别接收处理来自3个高性能天线收到的GPS信号,该天线具有稳定的相位中心,且具有多路径抑制能力。通过一系列算法,计算误差,识别完好性异常,生成差分数据和完好性监视数据,并通过频率为108MHz至118MHz的甚高频数传电台(VHF),以31.5kbps的信息速率[3],向机场周围约45km半球范围内的飞机提供GPS增强信息。机载LAAS接收机同时接收三种信号,即GPS基本系统信号、LAAS增强数据、和安装在机场的伪卫星信号,实现0.5m(95%)定位精度[4],并使完好性满足以上三个阶段的要求。到目前为止,LAAS系统的完好性指标尚不能完全满足民用航空的最高完好性指标,即III类精密进近的完好性要求。但经过改造的LAAS系统可满足飞机着舰要求,并由此产生了JPALS系统。
4.3 差分GPS无线电信标网(RBN-DGPS)
RBN-DGPS系统是在GPS基本系统的基础上,利用差分技术,借助海上无线电指向标播发差分修正数据和完好性信息,给海上用户提供高精度、高可靠的定位和授时服务的助航系统,被广泛应用于船舶进出港及狭窄水道导航定位、交通安全管理、航标定位、航道测量、航道疏浚、渔业捕捞、海上石油勘探等领域。该系统于2003年底覆盖全球海岸线,并因此使GPS正式成为国际海事组织认可的船舶导航主导航手段。
RBN-DGPS基站内配备两台GPS接收机,分别用于获取差分信息和完好性信息;两台计算机,一台用于生成GPS差分数据,一台用于生成GPS完好性数据;一台无线电信标发射机、以及GNSS接收天线和无线电信标发射天线组成。为保证系统的可靠性,基站内主要设备如GPS接收机、无线电信标发射机采用双机热备份工作。RBN-DGPS基站安装在全球沿海海岸,大致每隔100公里至300公里设置一个基站,基站位置尽可能靠近港口和河流入海口。
RBN-DGPS基站内生成的GPS差分数据(GPS L1伪距差分数据)和GPS完好性数据被调制到283.5~325.0kHz的导航信标频率上,信息速率为2400bps,调制方式为最小频移键控MSK(Minimum Shift Keying)。该信号通过安装在约30m高的两个铁塔间的全向T型天线发射出去,在无遮挡的海面上,半径300公里以内的用户可接收到该信号,陆地上由于受地面杂波的影响,平原地区RBN-DGPS信号作用半径约在150公里至200公里。
RBN-DGPS系统的技术特点是:用户与基站距离越近定位精度越高。在用户距基站50公里左右时,RBN-DGPS接收机的定位精度约为3m(95%);船舶靠岸时,随着用户接收机与基站距离的缩短,其定位精度可达0.5m(95%),完全满足船舶进港和靠岸要求。
由于RBN-DGPS技术已相对成熟,专用的RBN信号接收机的成本和体积也在不断下降,因此,近年来美国将RBN-DGPS技术扩展到了内陆,并采用低成本单塔架伞形发射天线,为内陆交通运输、通用航空等用户提供GPS差分和完好性增强服务,并将系统名称改为高精度国家差分GPS系统,即HA-NDGPS(High Accuracy National DifferentialGPS),据称,HA-NDGPS用户接收机的定位精度已达到0.15m。
4.4 连续运行参考站系统(CORS)
在大地测量、道路设计和施工、GIS数据采集、房屋和桥梁形变监测、地壳形变监测、气象探空、农机作业等领域,对GPS的定位精度提出了动态厘米级、静态毫米级要求,GPS基本系统是无法满足这些要求的,因此需要建设增强系统提高其精度,CORS技术和系统就是为满足这些应用需求发展起来的。
CORS系统由若干个GPS差分基站、一个中心站、和通信链路组成。每个差分基站至少有一台双频GPS接收机,将这些基站接收到的卫星原始伪距测量数据、载波相位测量数据送到中心站,中心站根据用户当前所在的粗略位置,计算出该用户所处位置的差分矫正数据,包括伪距差分数据和载波相位差分数据,将该差分矫正数据发送给用户接收机,即可采用载波相位定位技术,实现静态8-10mm,动态3-5cm的高精度定位。
根据以上工作原理,在CORS系统覆盖区域内,无论用户在哪里,中心站都可根据用户当前所在的粗略位置,为该用户计算出所需的差分数据,好象在用户的附近建立了一个临时虚拟基站,从而保证用户可以连续地进行高精度定位,避免了用户不断切换基站的问题。
CORS系统的工作原理决定了每个用户需要保持与中心站双向数据通信,每个基站需要保持与中心站单向数据通信,同时要求每个基站能够同时提供伪距测量值和载波相位测量值。
5 BDS增强系统和技术
2014年3月,针对北斗系统在各个领域的规模化应用问题,中国开始建设北斗地基增强系统。该系统由全国框架基站、地区加密基站、数据中心站和通信网络组成。
在全国建设150个框架基站,构成地基增强系统的框架网,框架网覆盖全国,在框架网的辅助下,使北斗系统在全国范围内实现米级定位。
在各地区增加区域基站,形成区域加密网,在框架网和区域加密网的辅助下,使北斗系统在该地区达到静态毫米级、动态厘米级定位。
6 结论
当GNSS被用于与经济、财产、生命相关的领域时,不但需要增强其精度,还需要增强其完好性,在这些领域,没有完好性保障的GNSS无法成为主导航手段,只能处于辅助地位。为了在这类领域充分发挥GNSS系统的作用,需要建设相应的增强系统。
解决GNSS完好性问题,涉及到多个信号处理环节、大范围基站覆盖、长时间的数据积累和统计分析。同时,试验验证GNSS完好性监视模型和算法的正确性和有效性,也要经历复杂的过程,因此,增强GNSS的完好性将是一件长期的工作。
本文是根据作者本人经历,并搜集整理世界各地当今所使用的GNSS增强系统和技术整理的,希望对从事相关工作的人员有所帮助,不足之处请批评指正。
参考文献:
[1] GPS Civil Monitoring Performance Specification, US GlobalPositioning Systems Wing (GPSW),April 30, 2009.
[2] GLOBAL POSITIONING SYSTEM WIDE AREA AUGMENTATION SYSTEM(WAAS) PERFORMANCE STANDARD, 1st Edition 31 October 2008, Technical Operations,Navigation Services, Federal Aviation Administration, 800Independence Ave, S.W, Washington, DC 20591.
[3] Clarce E. Cohen, Boris S. Pervan, H. Stewart Cobb, David G.Lawrence, J. David Powell, and Bradford W. Parkinson, Precision Landing ofAircraft Using Integrity Beacons, Global Positioning System: Theory andApplications, AIAA Volume 164.
[4] International Civil Aviation Organization (ICAO) Annex 10,Volume I (Radio Navigation Aids), “Aeronautical Telecommunications,” FifthEdition, July 1996, Amendment 77, November 2002. The GNSS standards andrecommended practices (SARPs) are contained in Section 3.7.
[5] RTCM RECOMMENDED STANDARDS FORDIFFERENTIAL GNSS SERVICE, Version 2.3, August 20, 2001, RTCM Special Committee No. 104.






 环球新时空
环球新时空 斗室智库
斗室智库