2016年12月21日 上午12:00:00
中国北斗,我国自主建设的卫星导航系统。自1994年北斗一号立项以来,历经二十六载,从无到有......

近年来,我国在遥感测绘、定位导航、科学实验等中高轨道卫星应用领域取得了一系列重大成果,如风......

据俄罗斯国家航天集团公司中央机械制造科学研究所刊物《航天与火箭制造》登载的文章称,该研究所......
几乎是前后脚,中国北斗在过去一个月内迎来两则重磅消息。8月31日,来自中俄卫星导航重大战略......
展望未来30-50年,我们将以卫星导航系统的时 空为基石,集成光学、声学、电学、磁学、机......

2017年11月,北斗三号首批组网卫星以“一箭双星”方式成功发射入轨,截至目前已有16颗卫......

据河南省测绘地理信息局网站消息,商丘市新建的13座北斗导航定位基准站全部建成并通过省级验收......

近日,深圳市在南山区西丽街道、桃源街道、宝安区新安街道、西乡街道启动了共享单车高精度定点停......

这似乎是个老问题,实际上也是个新问题。因为智能的问题,现在与无人驾驶密切相关,引出一堆新问......
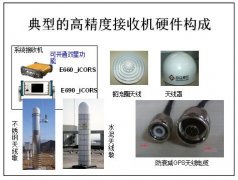
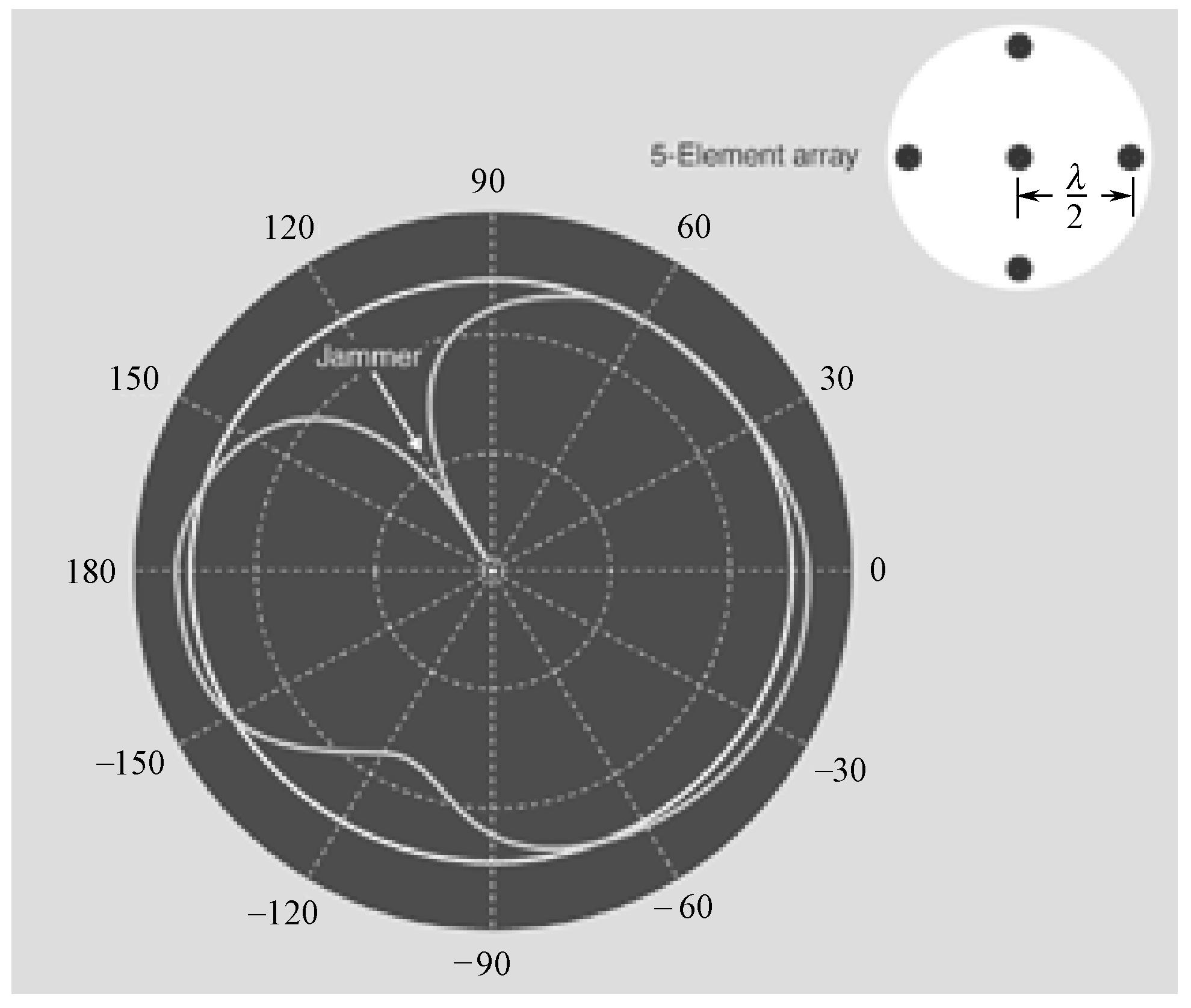
接收机通常有接收机天线、射频(RF)部分、基带部分、电源部分和控制显示存储部分组成。接收机......
 环球新时空
环球新时空 斗室智库
斗室智库