2016年12月21日 上午12:00:00
EMCORE 公司的特邀专栏作家谢尔盖·佐托夫(Sergey Zotov)介绍了惯性等级分类中的不一致之处,以及为什么是时候对术语进行标准化了。
随着惯性导航的蓬勃发展,惯性传感器及其性能等级的多样性得到了扩大。虽然存在一个全面的标准术语框架,包括军用和民用指南(例如,IEEE 惯性传感器术语标准),但它们在整个行业的采用和应用仍然不一致。这种不一致带来了两个主要挑战:
1. 数据表示的异质性:在比较不同制造商的数据表时,可以很容易地观察到表示和格式的明显差异。这种异质性阻碍了有效的比较,使最终用户的选择过程变得繁琐,并可能产生误导。
2. 测试协议差异:即使有明确的指南,制造商和最终用户在理解和应用方面也往往存在差异。由于对标准、术语和测试方法的解释不一致,这导致最终用户需要独立验证惯性传感器。
此外,该行业最近见证了一个令人担忧的趋势:对战术、高端战术、导航和战略等等级的基本术语的误解,而误解甚至往往被完全忽视。
鉴于这些持续的趋势,很明显,虽然现有标准发挥着根本性的作用,但需要一个更强大且普遍采用的顶级术语标准,清楚地记录 INS/IMU 和惯性传感器的战术/导航/战略等级。本标准不应存在有双重解释。

一、果然是惯性器件的它被叫成同一个名字
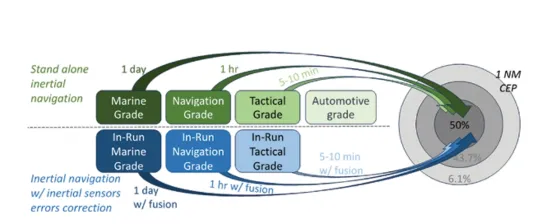
惯性系统的核心功能包括惯性测量单元(IMU)和惯性导航系统 (INS),是为导航问题提供独立的解决方案。这涉及根据移动物体先前确定的位置和 INS 的输出来计算移动物体的当前位置(速度)和姿态。这些系统自主解决导航问题的精度决定了它们的等级。定义惯性传感器类的任何其他方法都可能导致混淆。因此,IMU 和 INS 以及相关的惯性传感器分为四个不同的等级类别:航海、导航、战术和汽车。
1. 航海级
目的和精度:航海级 INS 代表最高性能类别,旨在提供极其精确的独立导航解决方案。它们在一天内保持小于 1 海里(约 1852 米)的误差范围。
应用:这些系统主要用于船舶、潜艇和特定航天器,对于需要高精度的长距离导航至关重要。
2. 导航级
标准合规性和精度:导航级 INS/IMU 必须符合 SNU 84 标准,该标准规定在运行的第一个小时内最大水平位置漂移为 1 海里(或在某些标准中约为 1.5 公里)。
应用:这些系统是商用客机和军用飞机不可或缺的一部分,可确保安全高效的导航,尤其是在外部导航辅助设备可能受限的环境中。
3. 战术级
短期精度:战术级 IMU/INS 专为短期导航解决方案而设计,可在短时间内以 1 海里的误差范围提供精确制导,通常为几到 10 分钟。
通过集成扩展功能:虽然它们在长期准确性方面存在局限性,但将它们与 GPS、视觉或 LiDAR 等其他系统集成可以提高它们的实用性,从而扩展它们在各个领域的适用性。
子类别:还值得注意的是,战术级可以进一步分为三个子类:低端战术级、标准战术级和高端战术级。低端战术级通常提供比标准战术级低一个数量级的精度。相反,高端战术等级,有时被称为近导航或低端导航等级,在精度方面弥合了标准战术等级和导航等级之间的差距。
4. 汽车级
有限的独立功能:作为最低等级的 IMU,汽车级 IMU 不足以进行精确的独立导航,但在与其他系统结合使用时非常有用。
其他应用:它们可用于姿态和航向参考系统(AHRS)、行人航位推算和其他辅助导航系统,为车辆技术做出了重大贡献。
通过遵循这个基于导航精度的分类系统,我们可以更准确地评估各种 IMU 和 INS 的能力和局限性。这种方法简化了为特定导航需求选择正确系统的过程,并确保分类与这些系统的核心功能直接相关。因此,在确定惯性传感器的类别时,直接和主要标准应该是它在自主导航系统中提供的精度水平。这种原始分类作为主要来源,为理解和分类惯性传感器提供了一个清晰明确的框架。
二、是否需要其他等级?
在过去十年中,将惯性传感器与校正器(如 LiDAR 和视觉里程计)结合使用的趋势很明显,但不包括 GPS 等确定绝对坐标的校正器。将 IMU 与非惯性传感器融合可以校准大多数(但不是全部)传感器误差。例如,在理想情况下,惯性传感器偏置可以校准到偏置不稳定性的水平,而 INS 姿态和位置误差可以通过角度随机游走 (ARW)、速度随机游走 (VRW) 和偏置不稳定性的水平来确定。
因此,这种方法可以将汽车级 IMU 的导航解决方案提升到战术级精度,或将战术级 IMU 提升到导航级精度。IMU 与非惯性校正器融合时达到的最终精度主要取决于校正器和估计滤波器的质量(这不是本文讨论的重点),但也取决于惯性传感器本身的某些参数。
在这种情况下,建立新术语是有意义的。如果传感器的参数(如 ARW、偏置不稳定性、VRW)在与非惯性校正器(不包括 GPS)融合时启用惯性系统以达到一定水平的性能,那么我们可以将传感器称为具有“运行中 [特定等级]”的质量。例如,如果汽车级 IMU 与非惯性传感器结合使用时,在 10 分钟后达到 1 海里的精度,则该 IMU 可以称为“运行中战术级 IMU”。这种分类认可了传感器融合带来的增强功能,从而提供了传感器在实际应用中性能的更细致入微的视图。
三、结论
本文不介绍新信息,因为讨论的所有细节都是公认的,并且在许多公共领域中很容易获得。本文的主要目标有三个。首先,它鼓励读者参与现有的惯性导航标准,突出它们在惯性传感器技术领域的重要性。其次,本文提请注意这样一个事实,即有时这些标准没有得到正确的解释,从而导致应用和理解的不一致。最后,本文旨在发起一场关于定义传感器等级的新标准的必要性的对话。通过提出这个问题,作者试图在行业内引发深思熟虑的思考和讨论,以完善和增强指导我们理解和使用惯性传感器的标准。
作者:
谢尔盖·佐托夫(Sergey Zotov)博士是EMCORE 研究员和首席科学家,在开发惯性导航产品方面拥有 20 年的经验。他专门研究推进石英 MEMS 惯性传感器的技术。此外,他还拥有同步定位和地图构建 (SLAM)、计算机视觉和传感器融合方面的专业知识。
注:该文译自《Inside GNSS》。

北斗导航向中国时空转变是个大方向大趋势大跨越,也就是从卫星导航向泛在时空过渡,是一种顺理成......
中国北斗,我国自主建设的卫星导航系统。自1994年北斗一号立项以来,历经二十六载,从无到有......

近年来,我国在遥感测绘、定位导航、科学实验等中高轨道卫星应用领域取得了一系列重大成果,如风......

据俄罗斯国家航天集团公司中央机械制造科学研究所刊物《航天与火箭制造》登载的文章称,该研究所......
几乎是前后脚,中国北斗在过去一个月内迎来两则重磅消息。8月31日,来自中俄卫星导航重大战略......
展望未来30-50年,我们将以卫星导航系统的时 空为基石,集成光学、声学、电学、磁学、机......

2017年11月,北斗三号首批组网卫星以“一箭双星”方式成功发射入轨,截至目前已有16颗卫......

据河南省测绘地理信息局网站消息,商丘市新建的13座北斗导航定位基准站全部建成并通过省级验收......

近日,深圳市在南山区西丽街道、桃源街道、宝安区新安街道、西乡街道启动了共享单车高精度定点停......

这似乎是个老问题,实际上也是个新问题。因为智能的问题,现在与无人驾驶密切相关,引出一堆新问......
 环球新时空
环球新时空 斗室智库
斗室智库